Bis zu 1.400mm große Bauteile positionieren und scannen
Während die erste PRAFS Variante 3620 mit sechs Robotern für Bauteile bis zu 3.000mm ausgelegt ist, kommen mit den neuen Modellen 2410 und 2414 nun kompaktere Systeme auf dem Markt. Diese sind für Bauteilgrößen von maximal 1.000 bzw. 1.400mm konzipiert. Beide Modelle arbeiten mit vier Robotern als Bauteilauflage. Es sind mobile, automatisierte Vorrichtungen, die mit Hilfe eines Hebewerkzeuges schnell auf dem Drehteller der ScanBox platziert und befestigt werden. Mit nur einem Stecker lässt sich PRAFS anschließen und aktivieren. Die Bauteildaten werden zuerst in die Zeiss-Inspect Software übertragen und dort mit den vorhandenen Tools über der PRAFS positioniert. Anschließend erfolgt die Programmierung in der Emusim-Software, wo die zwei, drei oder vier Roboter-Auflagepositionen innerhalb weniger Minuten festgelegt werden – ganz ohne Roboterpanel oder spezielle Programmierkenntnisse.
Präzise Bauteil-Positionierung
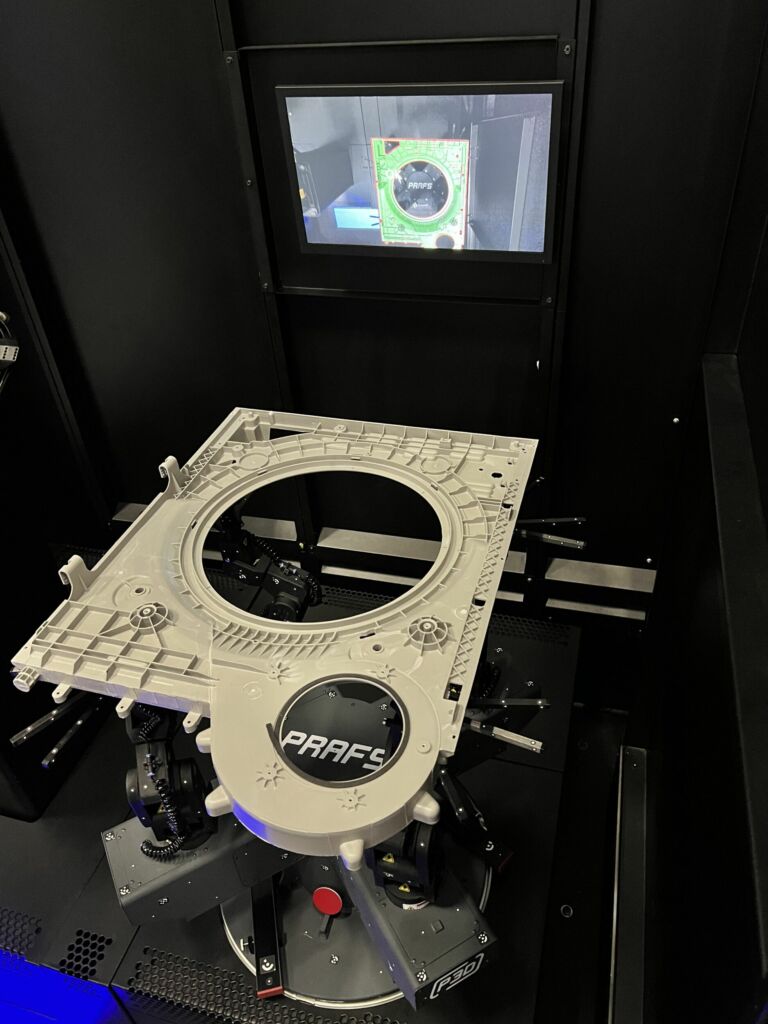
Nach der Programmierung werden die Roboterprogramme auf die PRAFS-Anlage übertragen, und der gesamte Messaufbau wird real getestet. Wenn der Bediener das Bauteil über das HMI aufruft, wird der Umriss des Bauteils sowie das Bauteil selbst per Augmented Reality auf einem Bildschirm angezeigt, genau in der vorgesehenen Einlegeposition. Der Vorteil der Visualisierung bietet klare Vorteile: Statt zusätzlicher Referenz-Roboter wird ein Vision-System mit Kamera und Bildschirm, montiert an der Rückwand der ScanBox, eingesetzt. Dies ermöglicht eine einfache Positionierung des Bauteils. Dadurch reduziert sich auch die Anzahl der erforderlichen Roboter von sechs auf vier. Dieser Prozess kann für tausende Bauteile offline vorbereitet und in kürzester Zeit abgerufen werden.
Positionierung auf der Vorrichtung
Das Auflegen des Bauteils erfolgt durch Live-Tracking. Zunächst erfasst die Kamera das Bauteil und sobald es sich der simulierten Zielposition nähert, wird es grün angezeigt. Mit einer OK-Bestätigung durch das System wird der Vorgang abgeschlossen. Nach dem Einlegen kann der Bediener die ScanBox verlassen und den Messvorgang per Knopfdruck starten. Die ermittelten Daten werden abschließend mittels Virtual Clamping gespannt und in der Inspect Software final ausgerichtet und ausgewertet. Durch den Einsatz von PRAFS und Virtual Clamping entfällt die Notwendigkeit physischer Spannvorrichtungen, was die Effizienz steigert, Fremdeinflüsse verhindert und die Rüstzeiten deutlich minimiert.
Daten für mehrere 1.000 Bauteile abrufbar
Auf einer PRAFS können mehrere tausend verschiedene Bauteile mit hoher Wiederholgenauigkeit gemessen werden. Die Bauteildaten und Messkonfigurationen werden offline programmiert, gespeichert und können unabhängig vom Standort jederzeit abgerufen werden. Alle drei Systeme sind in Kombination mit Virtual Clamping für eine Vielzahl weiterer Industrien geeignet: Automobilindustrie, Defense, Luft- und Raumfahrt, Schienenverkehr, Nutzfahrzeugbau und viele weitere Sektoren.